
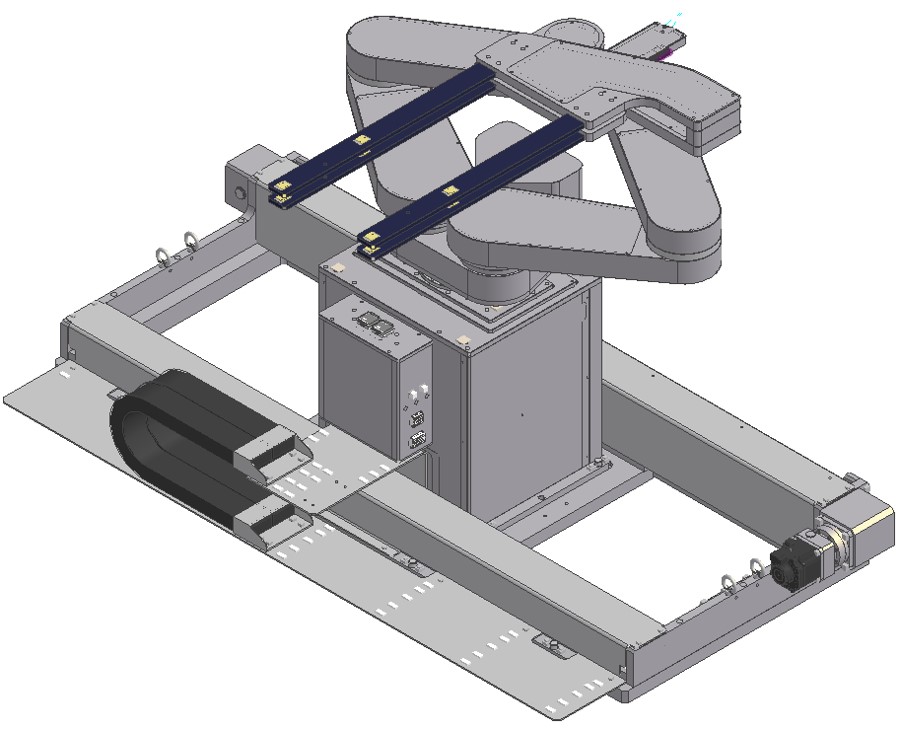
TAZMO Robot PLP Double Arm, Customizable
Data Sheet
| Model Series | PLP Series |
| Motor type | Servo motor |
| Robot arm type | Double arm |
| Target work/Handling object | Square substrate 300-650mmm |
| Operating axis | R1/R2/T/Z |
| Range of motion | RI-axis, R2-axis: Maximum arm reach 760mm(from swivel center)
T:±185deg Z:500mm S:880mm |
| Repeatability | R2,R2 ±0.1 mm
T: ±0.03 deg Z: ±0.1 mm S: ±0.25 mm |
| Wafer handling method | Vacuum chuck
Gripper Recess(pocket) |
| Wafer hold check | Vacuum chuck: Vacuum sensor with digital display
Gripper:Photomicro sensor |
| Network protocol | RS232C ETHERNET |
| Utility Power/Power source | Single-phase or Three-phase AC200V~230V +10% 5A~30A |
Customization:
| Type | Description |
| Arm type | T: Cylindrical Coordinate Standard Single |
| W: Cylindrical Coordinate Standard Double | |
| R: Square Coordinate Standard Single | |
| Elevator type | S: Standard |
| W: Telescopic 2-step Elevation | |
| Hand type | N: None |
| H: Horizontal changer | |
| T: Reverse | |
| Arm | 1: 385mm(R·W) |
| 2: 179mm(R·W) | |
| 4: 220mm(R·T) | |
| 6: 300mm(T) | |
| 8: 370mm | |
| Elevator | 1: 500mm(S·W) |
| 2: 700mm(W) | |
| 4: 300mm(S) | |
| Slide rail | 0: None |
| 1: 505mm | |
| 2: 1010mm | |
| 3: 1515mm | |
| 4: 2020mm | |
| 6: 600mm | |
| 8: 1800mm | |
| 9: 880mm | |
| I: 2000mm | |
| J: 2060mm | |
| Work gripping method (hand 1) | N: None |
| G: Gripper | |
| V: Vacuum chuck | |
| R: Recess (without seating sensor) | |
| P: Recess (with seating sensor) | |
| Work gripping method (hand 2) | N: None |
| V: Vacuum chuck | |
| G: Gripper | |
| R: Recess (without seating sensor) | |
| P: Recess (with seating sensor) | |
| Mapping sensor | T: Transparent type |
| N: None | |
| R: Reflective type |



