Home / Wafer Robot / PLP Double
Wafer Handling Robot For PLP, Double Arm
- Model No: PLP Double
Motor type: servo motor - Robot arm type:Double arm
- Operating axis: R1/R2/T/Z
- Operating environment: Atmospheric
- suitable for Square substrate 300-650mmm
Please Ask For Price!
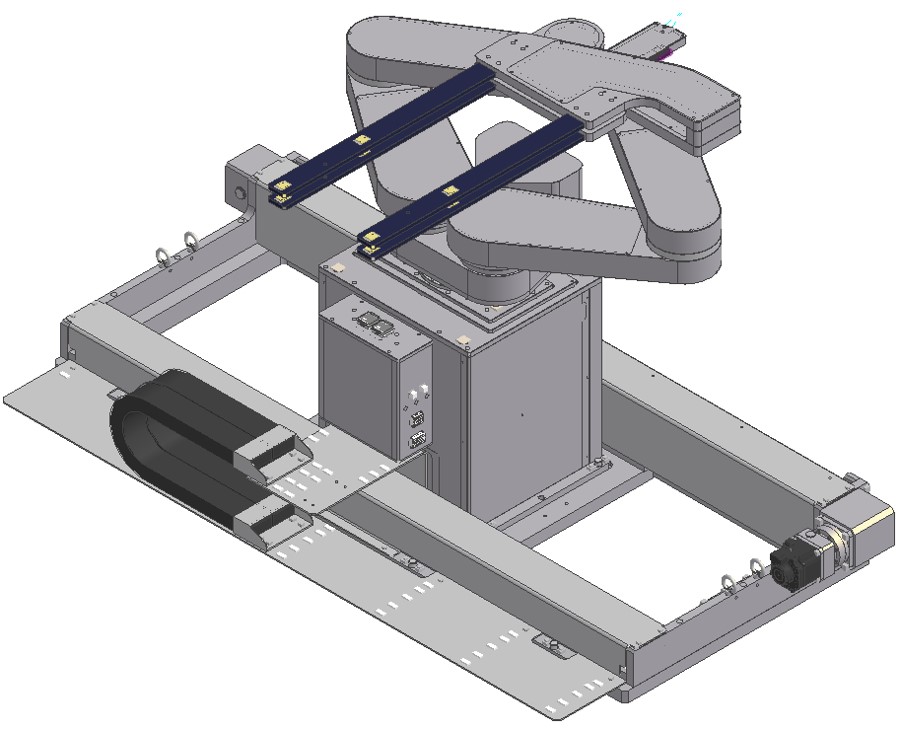
Wafer Handling Robot For PLP, Double Arm
This wafer handling robot is double arm with servo motor, developed for PLP to hold square substrate of size 300-650mm.
Data Sheet
Model Series | PLP Series |
Motor type | Servo motor |
Robot arm type | Double arm |
Target work/Handling object | Square substrate 300-650mmm |
Operating axis | R1/R2/T/Z |
Range of motion | RI-axis, R2-axis: Maximum arm reach 760mm(from swivel center) T:±185deg Z:500mm S:880mm |
Repeatability | R2,R2 ±0.1 mm T: ±0.03 deg Z: ±0.1 mm S: ±0.25 mm |
Wafer handling method | Vacuum chuck Gripper Recess(pocket) |
Wafer hold check | Vacuum chuck: Vacuum sensor with digital display Gripper:Photomicro sensor |
Network protocol | RS232C ETHERNET |
Utility Power/Power source | Single-phase or Three-phase AC200V~230V +10% 5A~30A |
Customization
TAZMO semiconductor wafer handling robots can be customized according to client’s configuration request. Please provide such information below when you send us inquires:
| Type | Description |
| Arm type | T: Cylindrical Coordinate Standard Single |
| W: Cylindrical Coordinate Standard Double | |
| R: Square Coordinate Standard Single | |
| Elevator type | S: Standard |
| W: Telescopic 2-step Elevation | |
| Hand type | N: None |
| H: Horizontal changer | |
| T: Reverse | |
| Arm | 1: 385mm(R·W) |
| 2: 179mm(R·W) | |
| 4: 220mm(R·T) | |
| 6: 300mm(T) | |
| 8: 370mm | |
| Elevator | 1: 500mm(S·W) |
| 2: 700mm(W) | |
| 4: 300mm(S) | |
| Slide rail | 0: None |
| 1: 505mm | |
| 2: 1010mm | |
| 3: 1515mm | |
| 4: 2020mm | |
| 6: 600mm | |
| 8: 1800mm | |
| 9: 880mm | |
| I: 2000mm | |
| J: 2060mm | |
| Work gripping method (hand 1) | N: None |
| G: Gripper | |
| V: Vacuum chuck | |
| R: Recess (without seating sensor) | |
| P: Recess (with seating sensor) | |
| Work gripping method (hand 2) | N: None |
| V: Vacuum chuck | |
| G: Gripper | |
| R: Recess (without seating sensor) | |
| P: Recess (with seating sensor) | |
| Mapping sensor | T: Transparent type |
| N: None | |
| R: Reflective type |