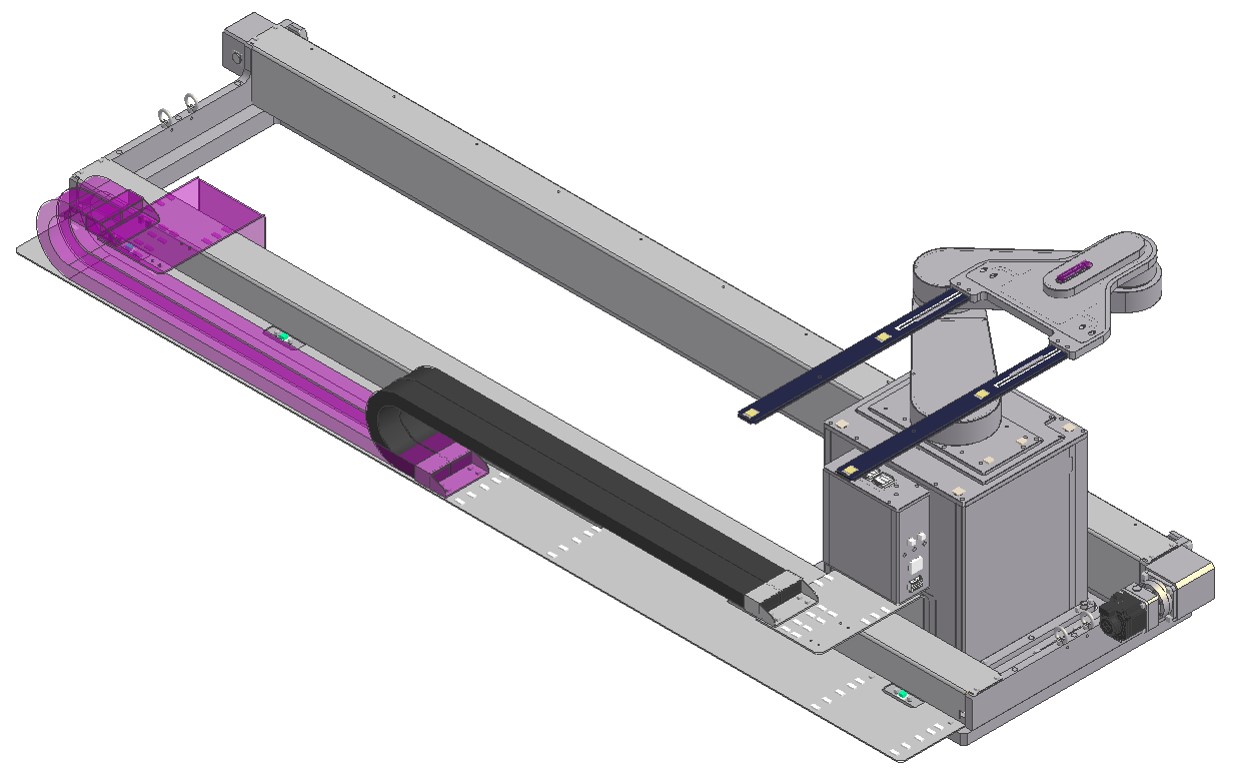
首页 > 大气手臂> PLP单臂 PLP适用工业机器人手臂, 方形面板 300-650mmm,单臂型 手臂型号: PLP 系列马达类型: 伺服马达手臂类型: 单臂运动轴: R/T/Z轴操作环境:大气环境传送方形面板 300-650mmm 请咨询价格 姓名 邮箱 电话 留言 提交询价 PLP工业机器人 工业机器人PLP系列为单臂款,配备伺服电机,专为PLP设计,是高效方形面板搬运的理想选择。 技术参数 手臂型号PLP系列马达类型伺服马达手臂类型单臂适用对象方形面板 300-650mmm运动轴R/T/Z 轴运动范围R轴:最大到达距离760mm (旋回中心开始)T轴:±185degZ轴:500mmS轴:2000mm往返精确度R轴:±0.2mmT轴:±0.03degZ轴:±0.1mmS轴:±0.25mm晶圆保持方法真空吸附夹持凹槽(接收盘)晶圆保持确认真空吸附:数字显示真空传感器夹持:微型光电传感器连接方式RS232C ETHERNET适用电源单相或三相 AC200V~AC230V+10% 5A~30A 定制服务 类别选项描述手臂T圆简标准单臂W圆筒标准双臂R直角标准单臂升降机构S标准W伸缩2段升降手指型N无H水平变换机构T翻转臂1385mm(R·W)2179mm(R·W)4220mm(R·T)6300mm(T)8370mm升降1500mm(S·W)2700mm(W)4300mm(S)导轨0无1505mm21010mm31515mm42020mm6600mm81800mm9880mmI2000mmJ2060mmWork把持方法(Hand1)N无G夹持V真空吸附R凹槽(无着座感应)P凹槽(有着座感应)Work把持方法(Hand2)N无V真空吸附G夹持R凹槽(无着座感应)P凹槽(有着座感应)传感器T透过型N无R反射型